So i finally came out with a hand gesture controlled robot that can follow the commands shown by hand.
Gesture controlled robot using accelerometer project report.
A survey a design of real time control robot system.
Robots are playing an important role in automation across all the sectors like construction military medical manufacturing etc.
An analysis available at traffic police gesture recognition using accelerometer human machine interaction hmi.
Pin 1 to 8 a0 a7 known as address bits so we do.
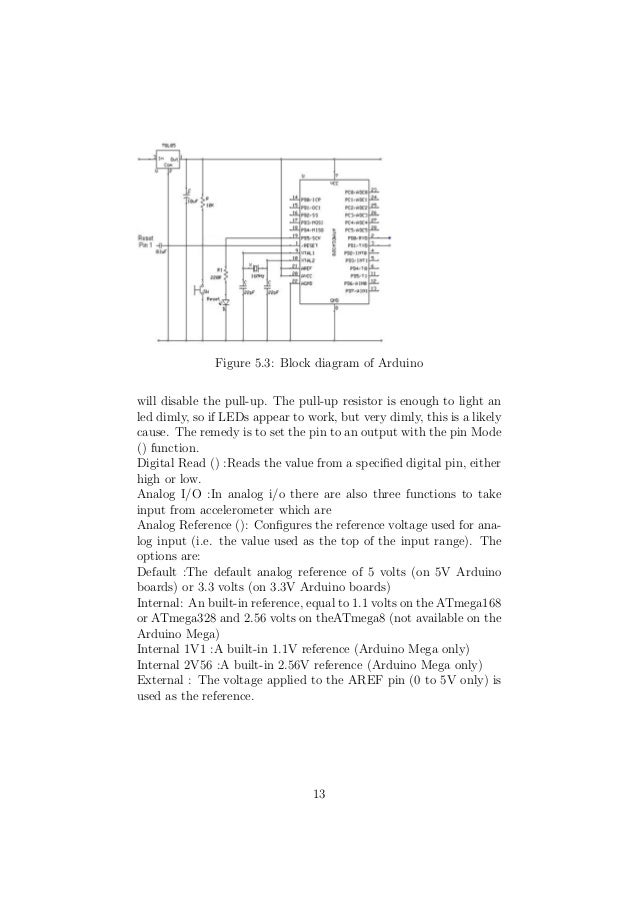
Gesture controlled robot using arduino 2018 37 ambalika institute of management of technology college code 363 figure 3 11 h bridge as seen in the image the circuit has four switches a b c and d.
When b and c.
This robot is an improvement of another diy project an rc car using rf module.
Sounds crazy but i promise it s very simple.
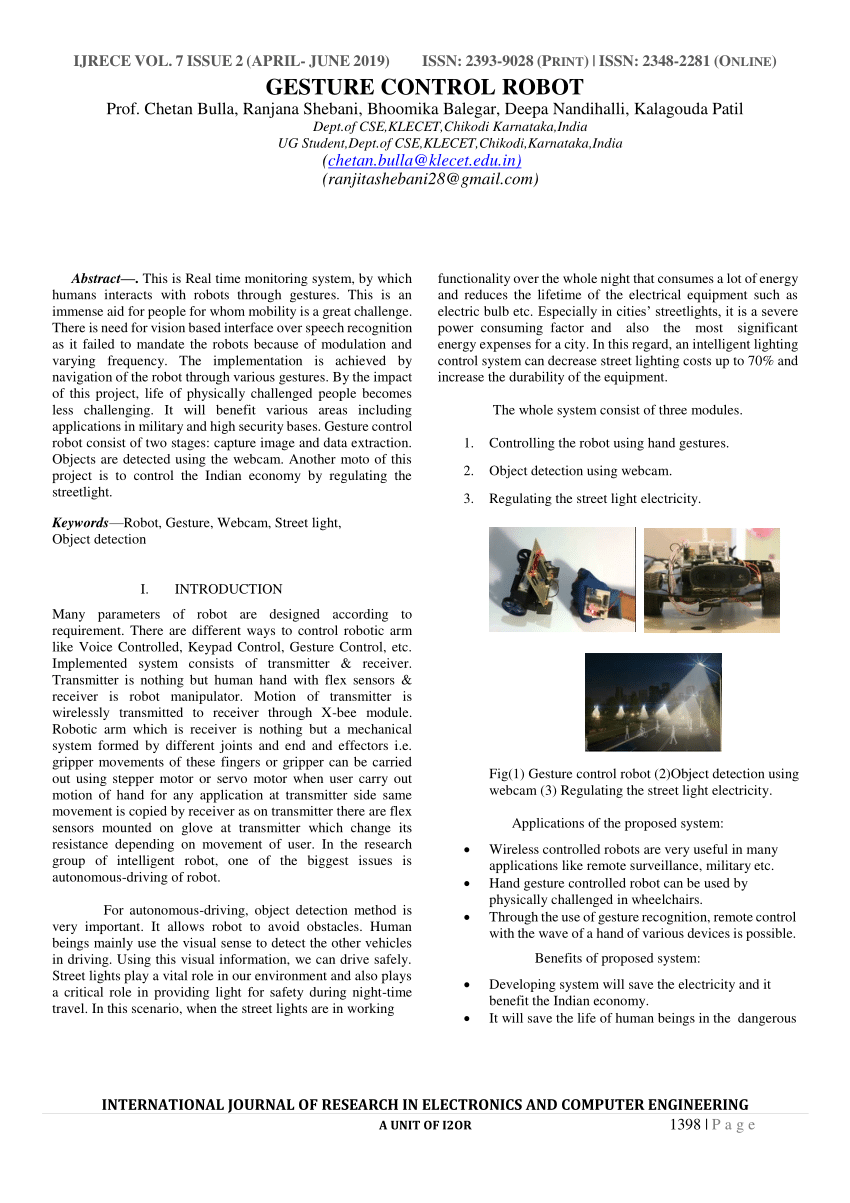
In this wireless gesture controlled robot project we are going to control a robot using hand gestures.
In this project we have used hand motion to drive the robot.
A gesture controlled robot is a kind of robot which can be controlled by your hand gestures not by old buttons you just need to wear a small transmitting device in your hand which included an acceleration meter this will transmit an appropriate command to the robot so that it can do whatever we want.
This project is divided into two parts transmitter device and receiver device.
In this project a hand gesture controlled robot is developed using mpu6050 which is a 3 axis accelerometer and 3 axis gyroscope sensor and the controller part is arduino nano.
Where a gesture device works as a transmitter device and a robot works as a receiver device when a transmitting.
Pin no 9 and 18 are use to bias the ic as pin 18 as.
Instead of using a remote control with buttons or a joystick the gestures of the hand are used to control the motion of the robot.
Not need to consider them.
Turning these switches on and off can drive a motor in different ways.
A gesture controlled robot using an accelerometer is one kind of robot which can be operated by the movement of hand by placing an accelerometer on it.
This is an easy user friendly way to interact with robotic systems and robots.
Gesture controlled robot accelerometer based the pin description of the ht12e is shown in the figure.
When switches a and d are on motor rotates clockwise.
Vcc and pin 9 as gnd.
Wireless gesture controlled robot final year project report muhammad ahkam khan muhammad waqar ee 09 6394 ee 09 6391 session 2009 2013 the project report is prepared for department of electrical engineering national university of computer emerging sciences in partial fulfillment for bachelor of electrical engineering bs ee department of.
17 gesture controlled robot accelerometer based.
Making a gesture control robot is actually very simple.
Wireless gesture control rbot.